
Point cloud formats: overview and practical use
Working with laser scan data begins with the raw scan and often ends in a fully modeled BIM model. In between lies a complex exchange between different software solutions, each with its own set of requirements. Point cloud formats are more than just a means of data storage. They significantly influence how efficiently data can be processed, whether all information is preserved and how flexibly one can respond to new project requirements.
In this article, we take a look at the following questions: Which formats are currently common? What are their strengths, and where do they reach their limits? Which formats are particularly well suited for efficiently visualizing large point clouds or collaborating on them?
Standard Formats: A Solid Basis for Data Exchange
Text-Based Formats: Open, but Inefficient
Example: ASCII files such as .XYZ, .CSV, or .PTS
These formats originate from the early days of laser scanning. They store point data in plain text, which is easy to read and flexible, but not very storage-efficient.
For example: A point cloud with around one billion points takes up about 88 GB in ASCII format. In comparison, the same dataset in binary formats like the e57 format requires only 27 GB and with modern, lossless compression, even just 11 GB.
Another drawback: When imported, the data first needs to be converted into a usable format, which slows down the process. While these formats are supported by many programs, they rarely play a role in practice today and are mostly used for error analysis or as a last resort when dealing with incompatible data.
LAS / LAZ: Proven in Remote Sensing
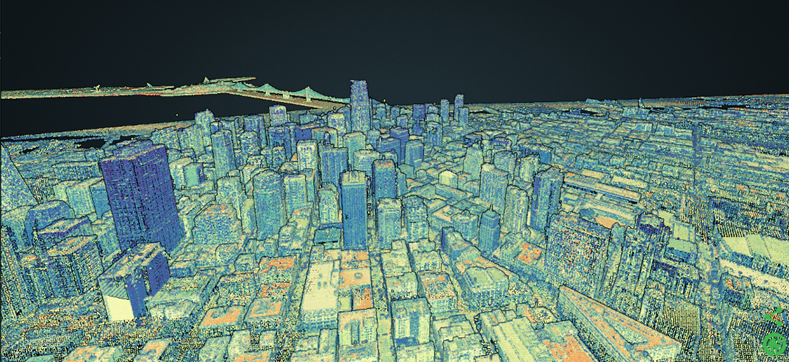
Example of a digitized flyover.
LAS was originally developed for airborne laser scanning. It stores coordinates as scaled integers and has a robust structure. The compressed variant, LAZ, significantly reduces file size, a real advantage when working with large datasets.
However, the format reaches its limits with terrestrial scans. Structured scans with row-column logic, panoramic images, or additional metadata cannot be represented. It is well suited for simple, unstructured point clouds, but less so for complex indoor projects with photo documentation.
E57: Versatile, but Technically Demanding

Diagram of the E57 format.
Source: https://www.ri.cmu.edu/pub_files/2011/1/2011-huber-e57-v3.pdf.
E57 was developed to fill exactly these gaps. It can store both structured and unstructured scans, supports panoramic images, and manages additional information such as scanner positions or sensor data within a single file.
However, this versatility comes at a cost: the format is technically complex, both for developers and users. Some software solutions interpret E57 slightly differently, which can lead to compatibility issues, especially with metadata or images. Loading certain contents can also be slow at times, which may cause delays in large projects.
That said, anyone who values standardization, completeness, and future-proofing will find E57 hard to ignore.
Proprietary Formats: Powerful, but Closed
Many scanner manufacturers rely on proprietary file formats, giving them full control over structure, content, and compression. These formats contain not only point data but also additional information such as calibration values, raw data, or scanner positions. They are usually essential for the initial processing, but exchanging data with other software becomes complicated.
| Manufacturer | File Extension | Scan Format | SDK Available? |
| Zoller+Fröhlich | ZFPRJ | ZFS | Yes (paid, Windows only) |
| FARO | LSPROJ | FLS | Yes (Windows only) |
| Riegl | RSP, RPP | RDBX | Yes |
| Leica | LGS, LGSX | PTG, etc. | Yes (mostly paid) |
| Trimble | RWP | - | No |
The biggest challenge: Many of these formats are tightly coupled with the manufacturer’s software, often undocumented, and the necessary SDKs (Software Development Kits) are only available with restrictions or for a fee. This creates a certain dependency on the respective provider, which can limit long-term flexibility.
Autodesk RCP / RCS: Well Integrated, but Proprietary

In Autodesk ReCap, point cloud files are prepared.
Autodesk takes a unique approach with its RCP and RCS formats: RCS stores individual scans, while RCP combines them into a project-based structure. The system is tightly integrated into products like the Revit® and AutoCAD® software, and others, making it ideal for users already working within the Autodesk ecosystem.
The downside: exchanging data with other systems is challenging because the formats are proprietary. Even with the SDK, accessing content is not straightforward. Outside the Autodesk world, one quickly runs into limitations. Large point clouds also introduce additional hurdles: they often require manual preprocessing, and the formats place high demands on bandwidth and storage. To work smoothly, the data usually needs to be stored locally.
Data Overload in Projects: Traditional Formats Reach Their Limits
Modern laser scanners capture several hundred million measurement points per location. In large projects with many locations, this quickly adds up to terabytes of data. Even with compression, these data volumes are too large to be fully loaded into memory or onto a graphics card.
Another issue: Traditional formats usually need to be fully loaded before anything can be displayed. This results in long wait times, especially when working via cloud or network storages.
Streaming formats address exactly this challenge. They organize point clouds using so-called octrees, hierarchical data structures that make it possible to load only visible data first and stream in details as needed. At the same time, the points are available in multiple levels of detail. This allows smooth zooming and navigation, even with slower internet connections.
Thanks to this structure, hardware and network requirements are significantly reduced. In combination with caching techniques, even massive point clouds can be visualized and analyzed in real time.
These formats are typically designed for web-based applications. Providers such as NavVis, Faro, PointSharePlus, and others offer commercial solutions for storing, managing, and sharing large point cloud projects in the cloud.
Comparing Streaming Formats
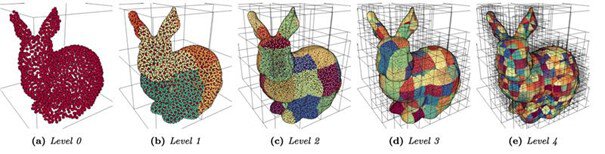
Gradual subdivision of a point cloud into an octree data structure.
Source: https://www.cg.tuwien.ac.at/research/publications/2020/SCHUETZ-2020-MPC/
Potree was originally developed for web-based visualization. In its first version, each octree node was stored as a separate file. In large projects, this quickly led to millions of individual files, making copying, backing up, and transferring the data time-consuming.
Potree 2 solves many of these issues through optimized storage, modern compression, and improved conversion.
EPT (Entwine Point Tile) comes from the GIS field. It stores many small LAZ tiles but also struggles with the high number of files.
CopC (Cloud Optimized Point Cloud) is a modern evolution: the entire octree is embedded within a single LAZ file. Existing tools can use these files, even if they don’t fully understand the specific structure. This saves time during transfer, without sacrificing compatibility.
Comparison: Formats, Strengths, Challenges
| Format | Strengths | Challenges |
| ASCII (.XYZ etc.) | Simple, readable, flexible | Very large, inefficient, outdated, no image-based metadata |
| LAS / LAZ | Standardized, compressible, widely used | No images, no structured scans, limited expandability |
| E57 | Complete storage, incl. images and scan structure | Complex, partially inconsistent implementations, limited performance when accessing data |
| RCP / RCS | Seamless Autodesk integration | Proprietary, barely usable outside Autodesk, high bandwidth requirements |
| Proprietary formats | Complete device data, powerful | Proprietary, low interoperability |
| Potree 1 | Streaming-capable, flexible | Many individual files, slow transfer |
| Potree 2 | Streaming-capable, compact, modern rendering, improved conversion | Not a standard, high technical entry barrier |
| EPT | Streaming-capable, modular | Very large number of files, no internal structure |
| CopC | Streaming-capable, LAZ-compatible, easy to transfer | Still relatively new, technically demanding, similar limitations to LAZ |
After the Project: Archiving
Projects involving point cloud data can easily accumulate hundreds of gigabytes or more. That’s why having an efficient and, above all, cost-effective archiving strategy is so important. Ideally, your archiving plan should meet these key criteria:
- Lossless Storage: Data should be preserved as accurately as possible. This is particularly important for future analyses where even small details can matter.
- Quick Access Based on Need: Depending on how likely it is that the data will be accessed soon, it should be stored in a way that doesn’t require a lengthy reprocessing sequence just to view it again.
- Reliable, Long-Term Storage: Data should be safely stored for at least as long as legally required. This often means considering cloud solutions in addition to redundant NAS systems.
A practical approach is to store data both in its raw format and in E57 format. This ensures that all information is preserved while also allowing for faster access when needed. While E57 is technically a standardized format, there’s no guarantee that every implementation will adhere to the standard. To cover all bases, it is a good idea to also archive installers for the entire toolchain along with links to where they can be obtained. Regular backup recovery tests can further ensure that data remains accessible over time.
When choosing storage media, local options like additional hard drives or NAS systems might seem like the obvious choice. However, they’re not always the most cost-effective or reliable in terms of data integrity. Large cloud providers offer special plans for long-term storage of big data volumes, sometimes at rates as low as a fraction of a cent per gigabyte.
For a balanced strategy, consider a mix of fast-access storage (which costs more per gigabyte) and slower, less expensive long-term storage. It's also worthwhile to check general virtual server providers. Some also offer competitive rates, often between 1–2 cents per gigabyte.
Special thanks to the Laser Scanning Forum community for their insights on this topic.
Conclusion
The chosen point cloud format has a major impact on storage requirements, loading times, data exchange, and further processing. Traditional text-based formats are hardly practical today. Open standards like E57 or LAZ provide a solid foundation for flexible workflows. Proprietary formats are often well suited for internal processes but quickly reach their limits when it comes to data exchange.
Anyone working with very large point clouds, or in the cloud, should opt for modern streaming formats like CopC or Potree 2 from the outset. This ensures high performance and scalable projects.
Practical tip:
- For data exchange: use standardized and compressed formats like E57
- For processing: use manufacturer formats, but stay within the same system
- For large, collaborative projects: plan a streaming strategy early on
- For archiving, consider storing the data in it's raw format, as well as E57, along with the software toolchain.
Qbitec takes a practical approach here: it brings the advantages of streaming formats directly into Revit. Thanks to a smart data structure and efficient caching, users can switch quickly between levels of detail even in very large projects, without loading times or data loss. This keeps access to the point cloud flexible, high-performing, and independent of project size or network environment, including panorama integration and smart visualization.